

| Home | Chapter 1 - Double Pendulum | Chapter 2 - Cornell Ranger Equations of Motion Derivation | Chapter 3 - Simulation of the Simplest Walker | Chapter 4 - Hip Powered Walker |
Double Pendulum
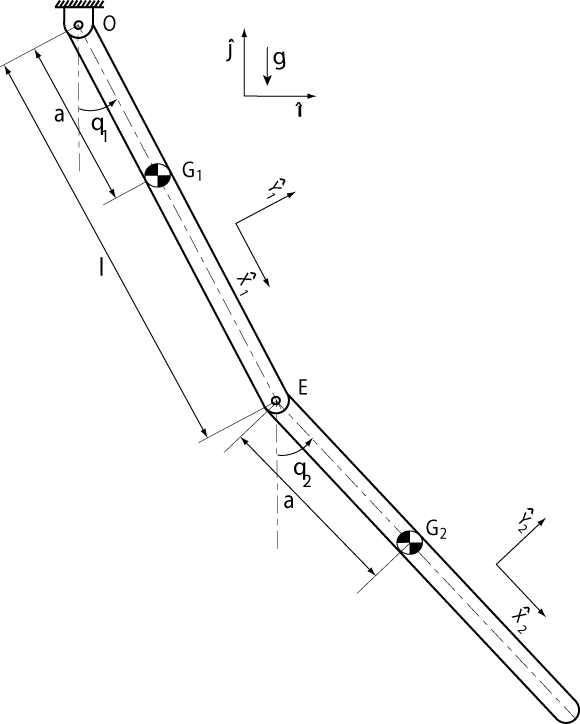
To illustrate the basics of dynamic MATLAB simulations, we will look at the simulation of a double pendulum. This example will cover derivation of equations of motion by hand, symbolic derivation of the equations of motion in MATLAB, simulation of the equations of motion, and simulation checks. Figure 1 depicts the double pendulum with the assumed coordinate systems, dimensions and angles.
Figure 1. Double Pendulum with Assumed Coordinate Systems, Dimensions and Angles
Finding the Equations of Motion
To find the equations of motion for a dynamic system, we use the Newton-Euler method. This method involves balancing the linear and angular momentum of a system. For our example, we will only perform angular momentum balances. Angular momentum balances must take place about a point and can be expressed as,

That is the sum of the moments is equal to the rate of change of angular momentum.
To find the equations of motion for the double pendulum, we will perform two angular momentum balances, one at point O and one at point E. Figure 2 depicts the free body diagrams for the two angular momentum balances.
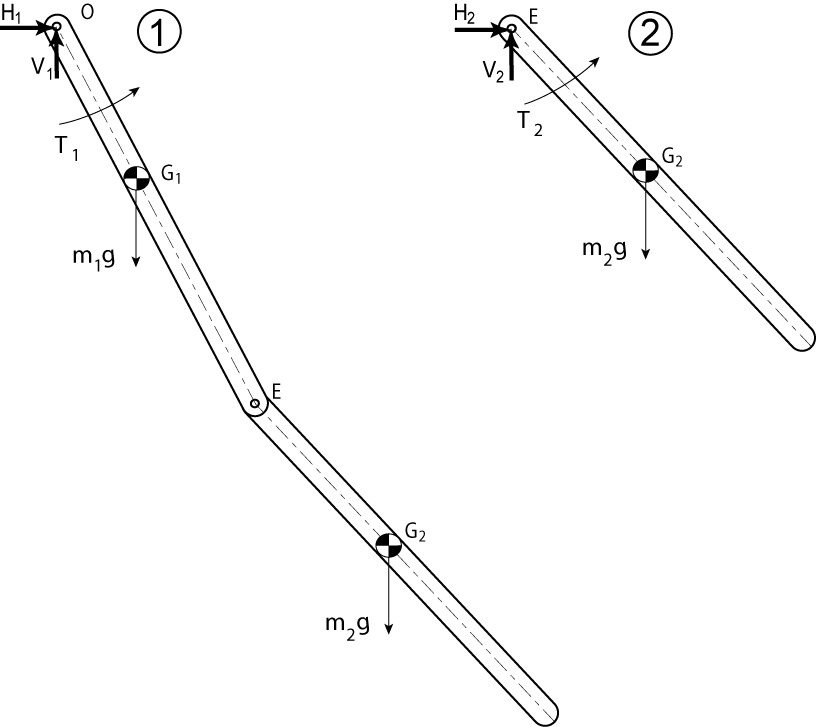
Figure 2. Free Body Diagrams of a) Both link attached, Angular Momentum balance about point O gives one equation b) Second link only, Angular Momentum balance about point E gives the second equation of motion
From the two free body diagrams, we get,




where,
 Masses of links 1
and 2
Masses of links 1
and 2
 Inertia of links 1 and 2
Inertia of links 1 and 2
 Gravitational acceleration
Gravitational acceleration
 Angular
accelerations of links 1
and 2
Angular
accelerations of links 1
and 2
 Accelerations of
links 1 and 2
Accelerations of
links 1 and 2
 External torques on links 1 and 2
External torques on links 1 and 2
 External moment about point A
External moment about point A
 Rate of change of angular momentum
about point A
Rate of change of angular momentum
about point A
 Position vector from point B to A
Position vector from point B to A
 Unit vectors along x, y and z axes
Unit vectors along x, y and z axes
The equations of motion result from
setting  and
and  .
.
Symbolic Deviation of the Equations of Motion in MATLAB
The derivation of the equations of motion for a given system can be done symbolically in MATLAB to reduce the number of errors a typical hand written solution can produce and to arrange the equations in such a way as to use them in a numerical MATLAB simulation. The full derivation code can be found at the end of this section,
We must first determine the symbolic variables that will be required to solve the problem. Any variable such angles or distances and its derivatives should be defined as symbolic. Additionally, any parameter in the problem such as length or radius should also be symbolic. This allows us to have as general solution as possible.
syms a l m1 m2 I1 I2 g T1 T2
syms q1 q2 u1 u2 ud1 ud2
We then define the coordinate frames we set up in the solution to our problem and any position vectors that will be needed for plotting and/or solving the problem.
%%%%%%% Reference frames %%%%%%%
i = [1 0 0]; j = [0 1 0]; k = [0 0 1];
X1 = sin(q1)*i - cos(q1)*j; Y1 = cos(q1)*i + sin(q1)*j;
X2 = sin(q2)*i - cos(q2)*j; Y2 = cos(q2)*i + sin(q2)*j;
%%%%%%% Position vectors %%%%%%
r_O_G1 = a*X1;
r_O_E = l*X1;
r_E_G2 = a*X2;
r_O_G2 = r_O_E + r_E_G2;
We now define the angular velocities, angular accelerations, mass velocities and mass accelerations in terms of the symbolic variables and position vectors.
%%%%%% Angular velocities and accelerations %%%%%
om1 = u1*k; om2 = u2*k;
al1 = ud1*k; al2 = ud2*k;
%%%%% Velocties (not needed here) and acelerations of masses %%%%
v_O = 0;
v_G1 = v_O + cross(om1,r_O_G1);
v_E = v_O + cross(om1,r_O_E);
v_G2 = v_E + cross(om2,r_E_G2);
a_O = 0;
a_G1 = a_O + cross(om1,cross(om1,r_O_G1)) + cross(al1,r_O_G1);
a_E = a_O + cross(om1,cross(om1,r_O_E)) + cross(al1,r_O_E);
a_G2 = a_E + cross(om2,cross(om2,r_E_G2)) + cross(al2,r_E_G2);
Next, we
code the statements for the angular momentum balance. Each angular
momentum balance will result in one equation of motion. Since this is
a planar problem, the equations of motion will be in the  direction
of resulting vector.
direction
of resulting vector.
%%%%% Angular Momentum %%%%%%%%%%%%%%%%%%%%%%
M_O = cross(r_O_G1,-m1*g*j) + cross(r_O_G2,-m2*g*j) + T1*k;
Hdot_O = cross(r_O_G1,m1*a_G1) + I1*al1 + cross(r_O_G2,m2*a_G2) + I2*al2;
M_E = cross(r_E_G2, -m2*g*j) + T2*k;
Hdot_E = cross(r_E_G2, m2*a_G2) + I2*al2;
%%%%% Equations of motion %%%%%%%%%%%%%%%%%%
AMB_O = M_O - Hdot_O;
AMB_E = M_E - Hdot_E;
%%% The k component has the equations of motion %%%
eqn1 = AMB_O(3);
eqn2
= AMB_E(3);motion result from
setting
and .
eqn1 = eqn1 - eqn2; %%There is no need to do this but we do it to make the resulting M matrix symmetric
We now want to manipulate the equations to fit the form of,

where


We can get  by plugging in zero for
both angular accelerations in each of the equations of motion and
taking the negative of the result. The negation is required because
we need to move those terms to the other side. Now, we can get the
first column of
by plugging in zero for
both angular accelerations in each of the equations of motion and
taking the negative of the result. The negation is required because
we need to move those terms to the other side. Now, we can get the
first column of  by substituting one for
by substituting one for  and zero for
and zero for  in each
angular momentum balance and adding
to remove any constants. To get
the second column of ,
we perform the same operations with
in each
angular momentum balance and adding
to remove any constants. To get
the second column of ,
we perform the same operations with  and
and  .
.
RHS1 = -subs(eqn1,[ud1 ud2],[0 0]) %negative sign because we want to take RHS to the right eventually
M11 = subs(eqn1,[ud1 ud2],[1 0]) + RHS1
M12 = subs(eqn1,[ud1 ud2],[0 1]) + RHS1
RHS2 = -subs(eqn2,[ud1 ud2],[0 0])
M21 = subs(eqn2,[ud1 ud2],[1 0]) + RHS2
M22 = subs(eqn2,[ud1 ud2],[0 1]) + RHS2
%%%%%%% Final system [M] [alpha] = [RHS] %%%%%%%%%%%%%%%
M = [M11 M12; M21 M22];
RHS = [RHS1; RHS2];
When we solve for the angular
accelerations, we will multiply the inverse of the mass matrix with
.
We will not symbolically invert the mass matrix since doing so is
computationally expensive compared to inverting it numerically.
We now have the necessary matrices to simulate the double pendulum. In this simpler case, we can copy and paste the equations of motion in the simulation m-file. In more complicated problem with more degrees of freedom, the resulting matrices are much larger and it is easier to have MATLAB create a m-file that is already setup for simulation. This case will be demonstrated in the next section.
In addition to deriving the equations of motion, we can also derive the kinetic and potential energy equations. This is a simple task of converting the equations into the symbolic variables already defined in the file.
%%%% Total energy (as a check on equations) %%%%
KE = simple(0.5*m1*(v_G1(1)*v_G1(1)+v_G1(2)*v_G1(2)) + 0.5*m2*(v_G2(1)*v_G2(1)+v_G2(2)*v_G2(2)) + 0.5*I1*u1*u1 + 0.5*I2*u2*u2)
PE = -m1*g*a*cos(q1) - m2*g*(l*cos(q1) + a*cos(q2))
Creating a Simulation in MATLAB
Now that we have the equations of motion, we can set up a simulation. The simulation will be setup into 3 parts: the driver which will integrate the equations of motion and create an animation, the right hand side of the equations of motion, and the energy equations.
First, we need to set up a file for the equations of motion. The m-file will contain a single function that takes in a time, set of angles and their derivatives, and parameters and returns the first and second derivatives of the angles. In this file, we need to put the M and RHS matrices and plug in the parameters, angles and derivatives. We can then find the angular accelerations by,

Additionally, we need to set up a m-file for the energy. Similarly to the equation of motion file, this file takes in the time, positions and derivatives, and parameters and returns the kinetic and potential energy at that particular instance.
We can now create the driver for the simulation. First, we must define the parameters, initial conditions, and a vector of times to integrate over.
%%%%%%%%% INITIALIZE PARAMETERS %%%%%%
%Mechanical parameters.
m1 = 1; m2 = 1; % masses
I1 = 0.5; I2 = 0.5; % inertias about cms
l = 1; % length of links
a = .5; % dist. from O to G1 and E to G2 (see figures)
g = 10;
% Initial conditions and other settings.
framespersec=50; %if view is not speeded or slowed in dbpend_animate
T=10; %duration of animation in seconds
tspan=linspace(0,T,T*framespersec);
q1 = pi/2-0.1; %angle made by link1 with vertical
u1 = 0; %abslolute velocity of link1
q2 = pi ; %angle made by link2 with vertical
u2 = 0; %abslolute velocity of link2
z0=[q1 u1 q2 u2]';
We then must set the absolute and relative error tolerances for the integration.
options=odeset('abstol',1e-9,'reltol',1e-9);
We can now choose an ode function. There are three we can choose from ode45, ode113, and ode23. We will choose ode113 because it is relatively faster than the others at higher precisions. Using ode113 and inputting the time span, initial conditions and parameters, we can integrate the equations of motion over the time period allotted.
%%%%%%% INTEGRATOR or ODE SOLVER %%%%%%%
[t z] = ode113('dbpend_rhs',tspan,z0,options, ...
m1, m2, I1, I2, l, a, g);
Ode113 will return the same time period and the resulting angles and angular velocities. Post processing can now be done. First, we create an animation. This is done by repeatedly plotting the positions of the masses in the same plot over the specified time span.
figure(1)
for i=1:length(tspan)
pause(.01)
xm1=-l*sin(z(i,1));
ym1=-l*cos(z(i,1));
xm2=xm1-l*sin(z(i,3));
ym2=ym1-l*cos(z(i,3));
plot([0],[0],'ko','MarkerSize',3); %pivot point
hold on
plot([0 xm1],[0 ym1],'r','LineWidth',2);% first pendulum
plot([xm1 xm2],[ym1 ym2],'b','LineWidth',2);% second pendulum
axis([-2*l 2*l -2*l 2*l]);
axis square
hold off
end
Additionally, we can plot the time histories of the angles and velocities.
figure(2)
plot(t,z(:,1),t,z(:,3));
xlabel('time (s)'); ylabel('position (rad)');
Checking the Simulation
After integrating the equations of motion in MATLAB and creating an animation, we need to ensure that the simulation is correct. One way to do this is to ensure that energy is conserved. In our derivation of the equations of motion of the double pendulum, we also derived the kinetic energy and potential energy of the system. The total energy of the system, the kinetic energy plus the potential energy, must be conserved. Since the total energy is a function of the state variables and their derivatives, which is what our integration produced, we can calculate the total energy for each time step and plot the difference between each step.
for i=1:length(t)
[KE(i), PE(i)] = dbpend_energy(t(i),z(i,:),m1, m2, I1, I2, l, a, g);
end
TE = KE + PE;
TE_diff = diff(TE);
figure(3)
plot(t(1:end-1),TE_diff)
The resulting plot should be very close to zero with some spikes that are less than the tolerance of the integrator.
Another way of checking a simulation is to reduce the problem to a simpler problem which can be solved by hand. In the case of the double pendulum, we can reduce the problem to a single pendulum with a point mass at the end and a massless rod. We can do this in the simulation by setting the parameters to the following values:











The second pendulum will still be present in the animation but will not move.

Figure 3. Single Pendulum showing assumed coordinate axis, distance, and angles
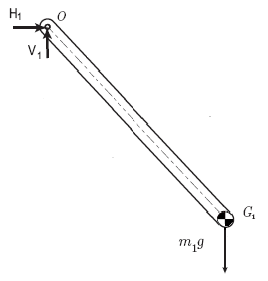
Figure 4. FBD of the single pendulum
From Figure 4, we can perform an angular momentum balance about point O.


The result of this balance is the differential equation,
Linearizing this equation about  and
and  and using the initial conditions, we can find a closed form of the
solution by hand.
and using the initial conditions, we can find a closed form of the
solution by hand.
We can compare the simulation's result with our analytic result by adding the following lines to the end of our code for the driver,
figure(4)
plot(t,z(:,1),t,.1*cos(sqrt(g*t/l));
xlabel('time (s)'); ylabel('position (rad)');
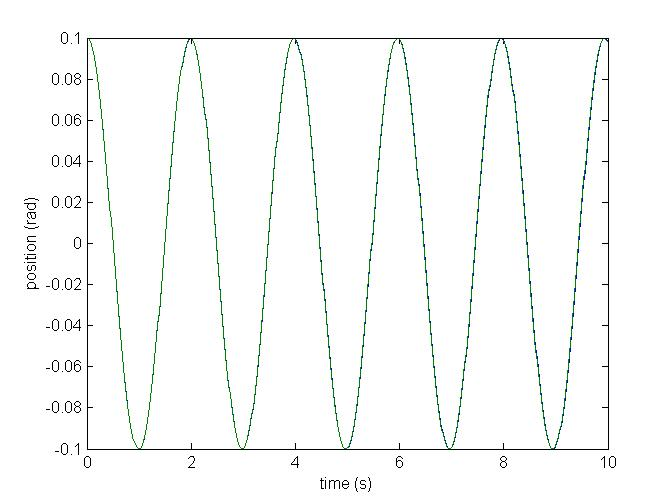
Figure 5. Plot of the Reduced Single Pendulum Model and Hand Derivate Equation of Motion
From the above
result, we can see that the simulation and analytic result match very
closely. Between this result and the conservation of energy, we have
shown that the simulation is valid. There are several other ways of
reducing the double pendulum. If we set  ,
we will get the same result
as above. Another way is to set
,
we will get the same result
as above. Another way is to set  .Additionally,
we can lock the angle
.Additionally,
we can lock the angle
 .
This will result in a single pendulum of length
.
This will result in a single pendulum of length  .
.
| Home | Chapter 1 - Double Pendulum | Chapter 2 - Cornell Ranger Equations of Motion Derivation | Chapter 3 - Simulation of the Simplest Walker | Chapter 4 - Hip Powered Walker |